3D Printed Robotic Arm V1
A 3D printed robotic arm powered by servo motors and Arduino control

Background
My second foray into robotics. After my first Arduino project I wanted to test the limits of my skills
DATE 2017-07-30
SKILLS Design, Programming, Electronics, Sourcing
STATE Continued in V3





Features
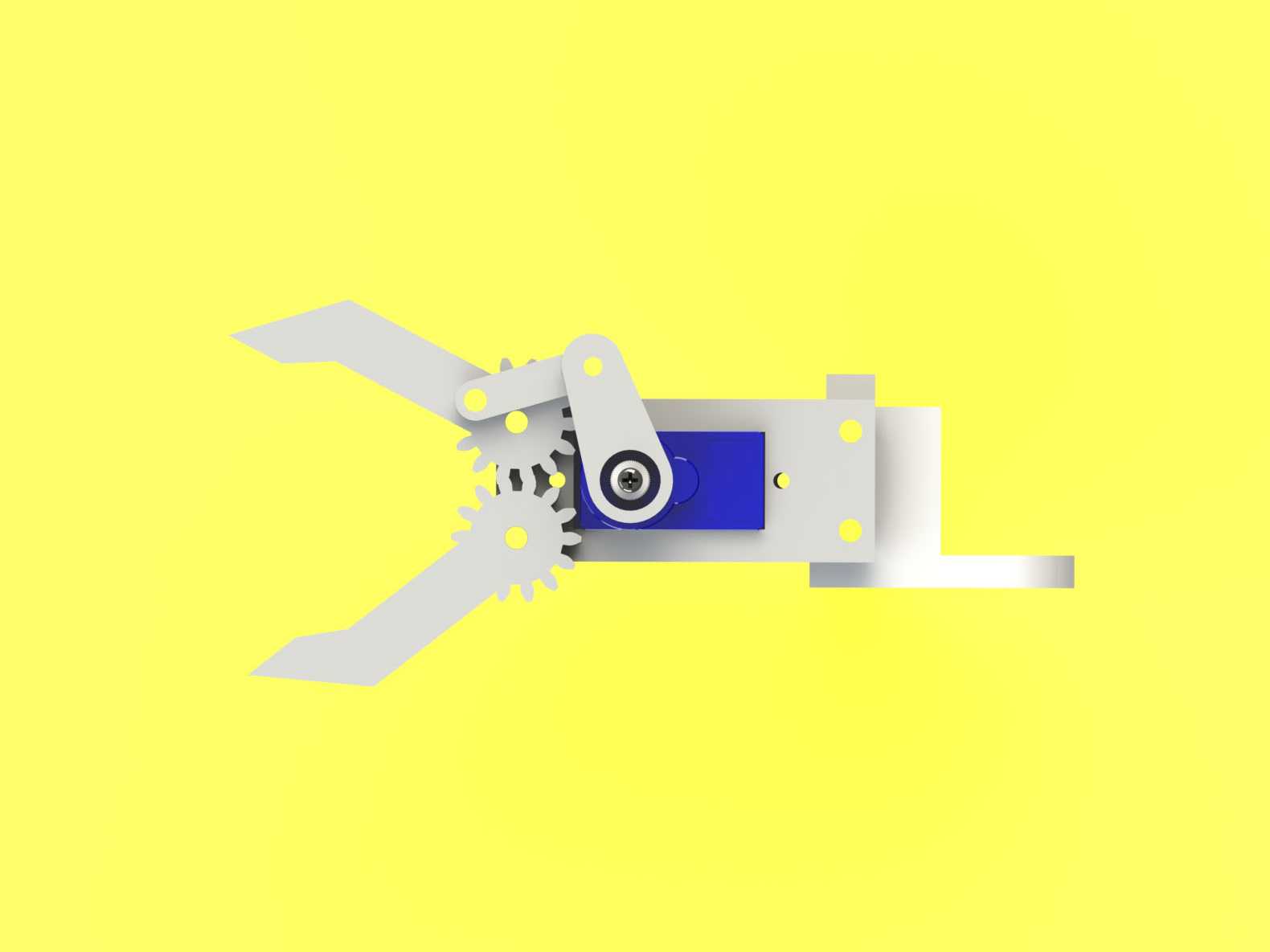
The arm is operated by rotating potentiometers to control the motors. To open and close the claw you press a button next to the potentiometers. An Arduino handles the input from the potentiometers and button and drives the servo motors.
Design process
Here’s a simple walkthrough of how I made this arm
- Sketched design concepts
- Wrote some geometric proofs and kinematic equations to dimension the arm; plotted kinematics on Matlab to drive dimensions
- Decided that I’m was ready to tackle this project
- Ordered metal hardware from eBay and Aliexpress
- Used the calculated dimensions and started making parts in Solidworks
- 3D printed the parts and began assembling them with the metal hardware
- Iterated the design several times until I was somewhat happy
- Designed electronics schematics
- Assembled electronics and wired them to arm
- The arm was ready to play with!